

高并发线程池设计
并发基本概念
- 所谓并发编程指的是在同一台计算机上"同时"处理多个任务。
- 并发是在同一实体上的多个事件。
处理事件过程出现阻塞
- 漫长的CPU密集型处理。
- 读取文件,但文件尚未缓存,从硬盘中读取较为缓慢。
- 不得不等待获取某个资源:
- 硬件驱动
- 互斥锁
- 等待同步方式调用的数据库响应
- 网络上的请求和响应
多线程的缺陷
单个进程或线程同时只能处理一个任务,如果有很多请求需要同时处理怎么办?
解决方案——运用多进程或多线程技术解决。
缺陷:
创建和销毁线程上花费的时间和消耗的
系统资源,甚至可能要比花在处理实际用户请求的时间和资源要多的多。活动的线程需要消耗
系统资源,如果启动太多线程,会导致系统由于过度消耗内存或"切换过度"而导致系统资源不足。
- 线程切换时,该线程执行的相关信息会被保存在对应的上下文中,线程数越多,所用于切换的时间就越多。
解决:——使用
线程池技术。
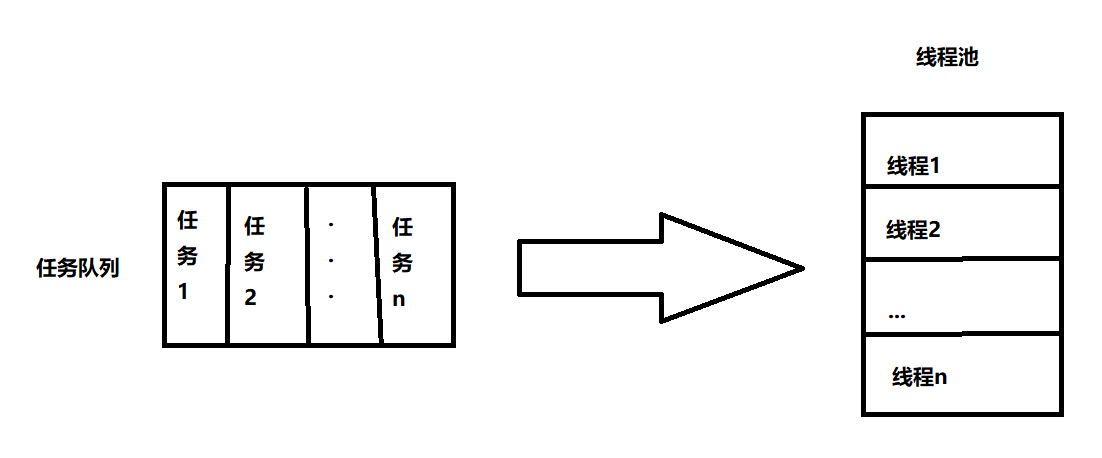
线程池
- 线程池
- 由一个任务队列和一组处理任务队列的线程组成。一旦工作进程需要处理某个可能"阻塞"的操作,不用自己操作,将其作为一个任务放到线程池的队列,接着会被某个空闲线程提取处理。
- 注意:
- 线程中的线程都要从任务队列中拿任务(同一个任务只允许一个线程拿到),会修改任务队列的链表,进程往里面加入新的任务也会修改任务队列的链表,二者无法同时修改,所以任务队列为临界资源,所以这里要实现同步与互斥。
线程池的核心组件
任务——待处理的工作,通常由标识、上下文和处理函数组成。任务队列——按顺序保存待处理的任务序列,等待线程中的线程组处理。线程池——由多个已启动的一组线程组成。条件变量——一种同步机制,允许线程挂起,知道共享数据上的某些条件得到满足。互斥锁——保证在任意时刻,只能有一个线程访问该对象。
Nginx线程池解析
- 注: 如下代码为本人看的某个视频中的资料,从Nginx中c抽下来的,貌似与最新的Nginx源码并不是很相同,因为经过删减,而且不是删减的最新版,但是大致意思我想应该是差不多的。:)
执行流程
- 创建线程池并初始化。
- 初始化开辟空间并进行相关默认设置及属性。
- 创建互斥锁、条件变量。
- 初始化任务队列。
- 创建线程池中的线程。并启动线程。这里面涉及到互斥锁与条件变量,等待任务并进行取出,详情请看代码中的注释。
这里为核心。- 分配任务内存
- 任务结构体和其任务执行函数的参数内存一起分配。
- 指定任务的执行函数。
- 将任务放入线程池。
- 使用结束后销毁线程池。
- 弄几个自杀任务放到任务队列中,等着线程们来取,然后依次自杀。
- 之后销毁互斥锁、条件变量。
- 最后free掉自己。
主要数据结构
任务结构体
thread_task_s
struct thread_task_s {
thread_task_t *next;//下一个任务
uint_t id;//任务ID
void *ctx;//上下文,任务要带的参数
void (*handler)(void *data);//函数指针,具体执行的任务。
};
//起别名
typedef struct thread_task_s thread_task_t;分配任务内存
thread_task_alloc
thread_task_t *
thread_task_alloc(size_t size)
{
thread_task_t *task;
//任务内存+函数参数内存
task = calloc(1,sizeof(thread_task_t) + size);
if (task == NULL) {
return NULL;
}
//task为thread_task_t指针
//指针与常数相加
task->ctx = task + 1;//task+1,此时指向的是任务函数的参数所在内存。
return task;
}任务队列结构体
thread_pool_queue_t
typedef struct {
thread_task_t *first;//指向第一个元素
thread_task_t **last;//指向最后一个结点
} thread_pool_queue_t;//任务队列,单链表结构。
- 补充:此单链表不同于我们在学数据结构时的那种定义,这里使用了二级指针,我感觉还是挺有意思的。相关的插入、取出操作在下面的相关线程池代码中有,这里我们提前拿出来先看一看。
- 任务队列定义:如上所示,这里我们重复写一下,这样更方便顺序看。
typedef struct { thread_task_t *first;//指向第一个元素 thread_task_t **last;//指向最后一个结点,通过last来链接。 } thread_pool_queue_t;//任务队列,单链表结构。
- 插入操作:
thread_task_t *task; //task为任务,thread_task_t类型,将先将next置空。 task->next = NULL; //*last其实就是first,即first=task *tp->queue.last = task; //注意last=&task->next,即目前task保存的是first后一结点的地址(注意这里是二级指针,这里我指一级指针为结点,二级指针就是结点的地址,即,next指针的地址)。 tp->queue.last = &task->next; /*我们接着模拟第二次插入 接着将上一个task的next = 本次要链接的task 接着拿到本次要链接的task的下一个结点的地址,next指针的地址。 */
- 取出操作:
task = tp->queue.first;//取出第一个 tp->queue.first = task->next;//首结点指针后移 if (tp->queue.first == NULL) {//任务队列空了,回到最初的状态,重新准备链接。 tp->queue.last = &tp->queue.first; }
线程池结构体
thread_pool_s
struct thread_pool_s {
pthread_mutex_t mtx; //互斥锁
thread_pool_queue_t queue; //任务队列
int_t waiting; //线程池中没有处理的任务还有多少
pthread_cond_t cond; //线程条件变量
char *name; //线程池的名字
uint_t threads; //线程池中线程的数量
int_t max_queue; //任务队列最多能够容纳多少个任务
};
//别名
typedef struct thread_pool_s thread_pool_t;线程池的初始化
thread_pool_init()
thread_pool_t* thread_pool_init()
{
int err;
pthread_t tid;
uint_t n;
pthread_attr_t attr;//线程属性设置结构体
thread_pool_t *tp=NULL;
tp = calloc(1,sizeof(thread_pool_t));
if(tp == NULL){
fprintf(stderr, "thread_pool_init: calloc failed!\n");
}
thread_pool_init_default(tp, NULL);//线程池部分属性默认设置
thread_pool_queue_init(&tp->queue);//线程池任务队列初始化
if (thread_mutex_create(&tp->mtx) != OK) {//创建互斥锁
free(tp);
return NULL;
}
if (thread_cond_create(&tp->cond) != OK) {//创建条件变量
(void) thread_mutex_destroy(&tp->mtx);
free(tp);
return NULL;
}
//线程属性初始化
err = pthread_attr_init(&attr);
if (err) {
fprintf(stderr, "pthread_attr_init() failed, reason: %s\n",strerror(errno));
free(tp);
return NULL;
}
//在线程创建时,将其属性设置为分离状态。
//主线程使用pthread_join无法等待该子线程。
//即无法再捕捉该子线程的状态
err = pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);
if (err) {
fprintf(stderr, "pthread_attr_setdetachstate() failed, reason: %s\n",strerror(errno));
free(tp);
return NULL;
}
for (n = 0; n < tp->threads; n++) {
//线程的创建
err = pthread_create(&tid, &attr, thread_pool_cycle, tp);
if (err) {
fprintf(stderr, "pthread_create() failed, reason: %s\n",strerror(errno));
free(tp);
return NULL;
}
}
(void) pthread_attr_destroy(&attr);
return tp;
}线程池任务队列初始化
thread_pool_queue_init
#define thread_pool_queue_init(q) \
(q)->first = NULL; \
(q)->last = &(q)->first线程池中线程的启动
thread_pool_cycle
static void *
thread_pool_cycle(void *data)
{
thread_pool_t *tp = data;//所在线程池,在创建线程的时候传递过来
int err;
thread_task_t *task;
if(debug)fprintf(stderr,"thread in pool \"%s\" started\n", tp->name);
for ( ;; ) {
//上锁
if (thread_mutex_lock(&tp->mtx) != OK) {
return NULL;
}
tp->waiting--;//等待的线程--
while (tp->queue.first == NULL) {//没有任务
//等待信号,先挂起,然后开锁。——等任务队列中有任务。
//被唤醒时,先上锁,然后正式被唤醒。
if (thread_cond_wait(&tp->cond, &tp->mtx)
!= OK)
{
(void) thread_mutex_unlock(&tp->mtx);//防御型编程,开锁。
return NULL;
}
}
//从任务队列中拿任务
task = tp->queue.first;
tp->queue.first = task->next;
//如果取出一个任务后,任务队列又空了,重新设置last指向。
if (tp->queue.first == NULL) {
tp->queue.last = &tp->queue.first;
}
//开锁
if (thread_mutex_unlock(&tp->mtx) != OK) {
return NULL;
}
if(debug) fprintf(stderr,"run task #%lu in thread pool \"%s\"\n",
task->id, tp->name);
task->handler(task->ctx);//当前执行任务函数,task->ctx为函数参数
if(debug) fprintf(stderr,"complete task #%lu in thread pool \"%s\"\n",task->id, tp->name);
task->next = NULL;
free(task);
}
}往线程池中投递任务
thread_task_post
int_t
thread_task_post(thread_pool_t *tp, thread_task_t *task)
{
if (thread_mutex_lock(&tp->mtx) != OK) {//上锁
return ERROR;
}
//任务队列尾邻接资源,进行互斥访问。
if (tp->waiting >= tp->max_queue) {//线程池等待任务队列是否达到极限
(void) thread_mutex_unlock(&tp->mtx);
fprintf(stderr,"thread pool \"%s\" queue overflow: %ld tasks waiting\n",
tp->name, tp->waiting);
return ERROR;
}
//task->event.active = 1;
task->id = thread_pool_task_id++;//任务id++
task->next = NULL;
//发送一个信号,唤醒一个线程,之后该线程就能从任务队列中获取任务,进行执行。
if (thread_cond_signal(&tp->cond) != OK) {
(void) thread_mutex_unlock(&tp->mtx);
return ERROR;
}
//一开始的时候last,默认指向的值first的地址。
//所以此时给*tp->queue.last赋值后,first = tast
//返回last为空,还是尾插法。
*tp->queue.last = task;
tp->queue.last = &task->next;
tp->waiting++;
(void) thread_mutex_unlock(&tp->mtx);
if(debug)fprintf(stderr,"task #%lu added to thread pool \"%s\"\n",
task->id, tp->name);
return OK;
}销毁线程池
thread_pool_destroy
void thread_pool_destroy(thread_pool_t *tp)
{
uint_t n;
thread_task_t task;
volatile uint_t lock;
memset(&task,'\0', sizeof(thread_task_t));
task.handler = thread_pool_exit_handler;//给一个自杀任务
task.ctx = (void *) &lock;//参数
for (n = 0; n < tp->threads; n++) {
lock = 1;
if (thread_task_post(tp, &task) != OK) {//投递任务
return;
}
while (lock) {//自杀任务中,会将lock置为0,终止循环。
sched_yield();//当前线程放弃CPU的优先权,让出CPU的执行权,让别的线程得到更多的执行机会。
}
}
(void) thread_cond_destroy(&tp->cond);//清理条件变量
(void) thread_mutex_destroy(&tp->mtx);//清理互斥锁
free(tp);//释放线程池
}线程自杀任务
thread_pool_exit_handler
static void
thread_pool_exit_handler(void *data)
{
uint_t *lock = data;
*lock = 0;
pthread_exit(0);
}示例
#include "thread_pool.h"
struct test{
int arg1;
int arg2;
};
void task_handler1(void* data){
static int index = 0;
printf("Hello, this is 1th test.index=%d\r\n", index++);
}
void task_handler2(void* data){
static int index = 0;
printf("Hello, this is 2th test.index=%d\r\n", index++);
}
void task_handler3(void* data){
static int index = 0;
struct test *t = (struct test *) data;
printf("Hello, this is 3th test.index=%d\r\n", index++);
printf("arg1: %d, arg2: %d\n", t->arg1, t->arg2);
}
int
main(int argc, char **argv)
{
thread_pool_t* tp = NULL;//定义一个线程池指针
int i = 0;
tp = thread_pool_init(); //线程池初始化
//分配任务内存
thread_task_t * test1 = thread_task_alloc(0);
thread_task_t * test2 = thread_task_alloc(0);
thread_task_t * test3 = thread_task_alloc(sizeof(struct test));
//指定任务
test1->handler = task_handler1;
test2->handler = task_handler2;
test3->handler = task_handler3;
//通过结构体指定参数
((struct test*)test3->ctx)->arg1 = 666;
((struct test*)test3->ctx)->arg2 = 888;
//任务放入线程池
thread_task_post(tp, test1);
thread_task_post(tp, test2);
thread_task_post(tp, test3);
sleep(10);
thread_pool_destroy(tp);
}
补充
volatile关键字:
- 有些变量是用 volatile 关键字声明的。当两个线程都要用到某一个变量且该变量的值会被改变时,应该用 volatile 声明,该关键字的作用是防止优化编译器把变量从内存装入 CPU 寄存器中。
如果变量被装入寄存器,那么两个线程有可能一个使用内存中的变量,一个使用寄存器中的变量,这会造成程序的错误执行。volatile 的意思是让编译器每次操作该变量时一定要从内存中真正取出,而不是使用已经存在寄存器中的值。来源-菜鸟教程-C/C++ 中 volatile 关键字详解-多线程下的volatile。
评论区